一、ArduPilot网络技术概述
ArduPilot作为开源自动驾驶系统,其网络技术是实现多设备通信与协作的核心。网络技术主要用于地面站(GCS)与飞行器、飞行器之间以及传感器网络的通信。常见的通信方式包括串口、Wi-Fi、4G/5G蜂窝网络和LoRa等,其中MAVLink协议作为标准通信协议贯穿整个系统。
二、网络技术开发要点
- MAVLink协议开发:MAVLink是轻量级的消息传输协议,支持命令、状态和数据流的传输。开发者需要熟悉其消息结构,并能够扩展自定义消息以满足特定需求。
- 通信链路管理:开发中需处理多种链路(如USB、TCP、UDP)的切换与冗余。例如,在Wi-Fi信号弱时自动切换到蜂窝网络,确保通信的可靠性。
- 地面站与飞行器通信:通过MAVLink实现双向数据交换,包括发送控制命令、接收遥测数据(如位置、电池状态)和视频流。开发者需优化数据传输效率,减少延迟。
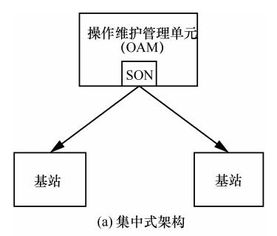
- 多飞行器组网:支持多机协同任务,需实现网络同步和冲突避免机制。例如,使用Ad-hoc网络或中心节点协调飞行器间的通信。
- 安全与加密:网络通信易受攻击,开发中应集成加密措施(如TLS/SSL)和身份验证,防止数据篡改或未授权访问。
三、开发工具与实践
- 使用ArduPilot的开发者库(如pymavlink)进行快速原型开发。
- 利用Wireshark等工具分析MAVLink流量,调试通信问题。
- 在实际部署中,测试网络在不同环境(如城市、野外)下的性能,并优化参数。
四、未来趋势
随着5G和边缘计算的发展,ArduPilot网络技术将向低延迟、高带宽方向演进,支持更复杂的自动驾驶应用。开发者应关注协议更新和硬件集成,以提升系统整体性能。
网络技术在ArduPilot开发中至关重要,掌握其核心协议和开发方法,将有效推动自动驾驶系统的创新与部署。